原子力システム 研究開発事業 成果報告会資料集
セル内遠隔設備の開発
(研究代表者)滑川 卓志
(再委託先)国立大学法人筑波大学
1.研究開発の背景とねらい
(1) ペレット成型設備のセル内遠隔保守対応モジュールの開発
FBR サイクル実用化開発(FaCT)の燃料製造施設では、低除染TRU 燃料を製造する。これは従来の高除染MOX 燃料に比べ高い放射能と発熱性を有するため、従来のグローブボックス方式とは異なり燃料製造機器設備は全てセル内設置となる。そのような燃料製造施設を実現するためには、セル内機器設備の保守補修を遠隔で実施する手順・手法を含めたシステム技術開発が必要である。そこで、同一工程設備内で粉末とペレット成型体を取扱う成型設備(整列部を含む)を代表設備とし、モジュール設備化による遠隔保守対応設備技術を開発する。
(2) セル内遠隔ハンドリング設備の開発
上記設備の遠隔保守を実施するため、遠隔ハンドリング設備側の開発を行い、モジュール化設備との最適な組合せシステム技術を開発する。
(3) ペレット検査技術の開発
日産7 万個規模で、中空タイプの焼結済みペレットの外観・寸法及び重量測定をセル内で実施し、かつ遠隔保守が可能なペレット検査設備技術を開発する。
(4) TRU 燃料粉末の分析技術の開発
FaCT では、成型工程での原料粉末流動性を改善するため、粉末に水分を添加して造粒する設計としている。成型以降の工程ではプラントの量産性を高めるため乾燥系での取扱としており、臨界管理上、燃料粉末の含水率管理が必要である。また、安定操業の観点からは、粉末特性の異常を早い段階で検知する必要がある。この要求を満たすため、インラインで燃料粉末の移送を妨げることなく迅速に含水率、粒度分布、粉末流動性を測定できる技術を開発する。また、O/M 比を測定する技術を開発する。
2.研究開発成果
(1)ペレット成型設備のセル内遠隔保守対応モジュールの開発
ペレット成型設備のモジュール化設備を概念設計した。モジュールの着脱に関する基本構造概念を図1に示す。成型設備は全てモジュール単位で交換が可能であり、27の単独の「モジュール」、及び、その単独のモジュールが複数組み合わさり、かつ、それ自体が一つのモジュールとして着脱可能な「複合モジュール」10で構成される。図2に成型金型部のモジュールの概念図を示す。これらのモジュール構成のうち代表的なモジュール(成型機、成型金型部、成型機取出し機構、ペレット搬送装置)のモックアップ試験機を製作し、(2)のセル内遠隔ハンドリング設備との組み合わせによる総合試験により、モジュール構造の妥当性を確認するための試験を進めている。試験装置の全体を図3に示す。
図1 モジュール基本構造概念
図2 モジュール概念図(成型金型部)

図3 ペレット成型設備モジュール試験機全体
① FaCT の燃料製造施設でのセル内設備モジュール交換用のハンドリング設備として単腕型のパワーマニプレータ及びセル内クレーンを想定している。パワーマニプレータの制御技術開発のため、市販の汎用ロボットアームを用いた遠隔保守マニプレータシステムを製作し、開発試験を実施している。操縦方式として、ジョイスティック方式(図4)及びロボットスーツ方式(図5)のコントローラを整備し、ロボットアームとの組合せにより上記(1)の代表的なモジュール試験機を対象に、ハンドリング試験を実施している。成型機モジュールの着脱試験からモジュール交換の所要時間を算定し、各モジュールの交換目安の6時間の達成状況を確認する。また、セル内で発生するちょっとした工程設備の停止(いわゆる、チョコ停)に対応するハンドリング設備として、転倒したペレットあるいは移送過程で詰まりを起こしたペレットの姿勢修復を10分で行う遠隔保守ロボットアームシステム、ロボットスーツ方式コントローラによる開発試験を進めている。

図4 ジョイスティック方式コントローラ

図5 ロボットスーツ方式コントローラ
② 遠隔保守マニプレータシステムの操作において、セル内の遠隔操作の状況を的確に把握することがマニプレータの運転操作における作業信頼性の向上の大きな要因である。このため、CAD情報にレーザーレンジファインダのリアルタイム情報を組合せた作業状況認識支援機能(図6)を組み込んだマン・マシン・インターフェース(MMI)技術を開発している。また、マニプレータ操作試験の実施時に心電情報や体温変化等のオペレータの身体情報を採取し、作業負荷(メンタル・ワーク・ロード)を評価し、最適システムの構築に反映する。

図6 カメラ映像と作業状況認識支援情報
① 画像解析による外観検査及び寸法検査装置、スロープ移送方式の電子天秤を用いた重量測定装置から構成されるペレット検査システムの概念設計を実施した。ペレット検査装置試験機を製作し、模擬ペレットを用いた試験運転を実施している。
② 試験機のペレット搬送能力が目標の1.23 秒/個(70,000 個/24 時間)以上であることを確認した。また、単体機能試験(ペレット搬送装置との組み合わせなし)により得られた測定精度の確認結果は以下のとおり。重量測定では、目標精度の±5mg を若干超える測定精度のバラツキがあったため、改良を実施している。外観検査では、0.1mm以下の空孔(欠け)、幅0.1mm 以上の割れが識別できることを確認し、画像処理技術を用いたペレットの外観検査技術の成立性を確認した。寸法検査では、±0.01mm 以内の精度で寸法測定ができることを確認し、画像処理技術を用いたペレットの寸法検査技術の成立性を確認した。
ペレット検査搬送装置と組み合わせて実施した平成20年度の試験では、外観、寸法検査モジュールの目標精度が達成できなかった。原因としては、ペレット搬送装置の影が影響していると考えられるため、改良調整を実施している。今後、最終的な性能が目標値を満足することを確認する。
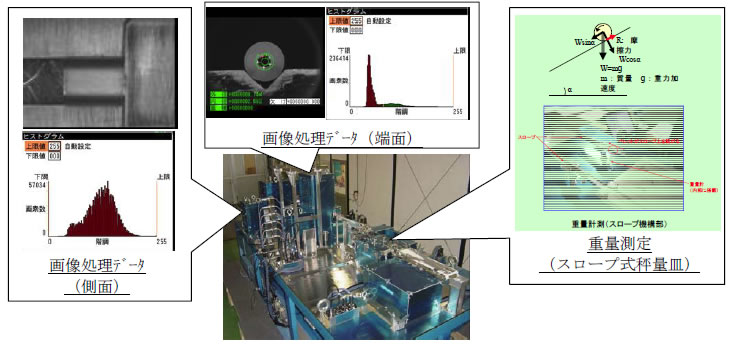
図7 ペレット検査設備試験機
③ 試験機は、各測定の検出器単位でモジュールを構成し、セル内でのモジュール交換が可能な構造としている。ハンドリング設備との組み合わせ試験により、モジュールの着脱性を確認する。
① インライン分析装置(図8)
含水率:赤外、粒度分布:レーザー回折、流動性:カサタップ密度測定手法を用いたインライン分析測定設備の概念設計を実施した。インライン分析測定試験装置を製作し、模擬粉末を用いた試験を実施し、一連の測定が約14分で終了し、目標の処理時間(30 分以内)を達成していることを確認した。インライン分析測定試験装置の遠隔によるモジュール着脱保守性の確認、及びモジュール着脱操作前後で測定精度への影響がないことを確認する。
② 遠隔O/M 比測定設備(図9)
O/M 比測定:熱天秤方式のO/M 比測定装置の概念設計を実施した。また、O/M 比測定装置試験機を製作し、模擬試料による試験で目標時間達成が可能であることを確認した。
模擬粉末を用いた本装置のモックアップ試験を継続中である。

図8 インライン分析装置試験機
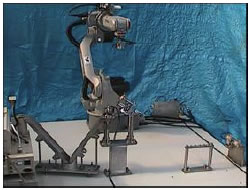
図9 O/M比測定設備試験機
3.今後の展望
本年度は、4カ年計画で進めてきたセル内遠隔設備の開発のまとめとして、セル内の遠隔保守補修技術、ペレット検査技術、TRU 燃料粉末分析技術について、現在試験機を用いた総合試験を実施している。今後、それぞれの技術について、以下の試験を完了し、取り纏めを行う。
- セル内の遠隔保守補修技術の開発として、これまで進めてきたセル内遠隔保守補修を想定したモジュール化成型設備の構造からモジュール着脱に要する要素動作の推定時間を積算し、目標である6時間以内に作業が完了できる見通しを得ている。現在実施している代表的モジュールとハンドリング設備とを組み合わせたモックアップ試験から、これらの要素動作に係る実際の作業負担、所要時間等を抽出し、成型設備全体のモジュール交換作業の目標時間の達成度を検証することで、この技術の成立性を確認する。
- セル内のペレット検査技術及びTRU 燃料粉末分析技術の開発として、これまでセル内におけるペレット検査の遠隔自動化及びTRU 燃料粉末分析のインライン化した試験機を開発し、所期の検査分析精度が得られることを確認している。本年度は、試験機モジュールを着脱した後でも検査分析精度が得られることを確認し、これらのセル内保守技術の成立性を確認する。
次年度のFaCT の設計研究の中で、本公募の成果技術をその他のセル内遠隔設備(焼結炉等)へ適用する場合の課題を抽出し、プラント全体の共通的な遠隔保守技術としての採否を判断する。